Time-Aware LSTM for Gaze Prediction in Mixed Reality Under Latency Perturbations
Accepted at XR Security 2025 workshop at ACM MobiHoc. **XR Security Best Poster Award**.
Oct 1, 2025
Perception Graph for Cognitive Attack Reasoning in Augmented Reality
Accepted at XR Security 2025 workshop at ACM MobiHoc.
Oct 1, 2025
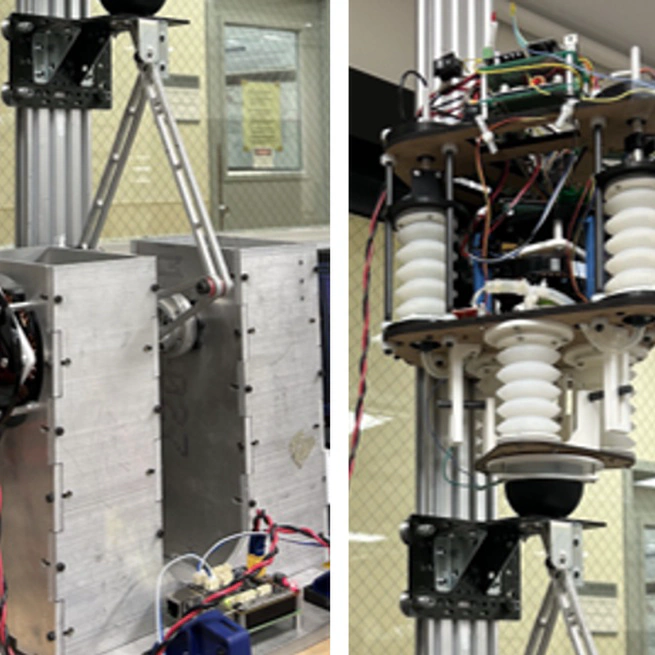
Tunable Leg Stiffness in a Monopedal Hopper for Energy-Efficient Vertical Hopping Across Varying Ground Profiles
Some studies show that animals will adjust their leg behavior while in different environments. So in this research, we are aiming to find energy loss reduction strategies by studying how the leg makes contact with the ground.
Jan 1, 2025
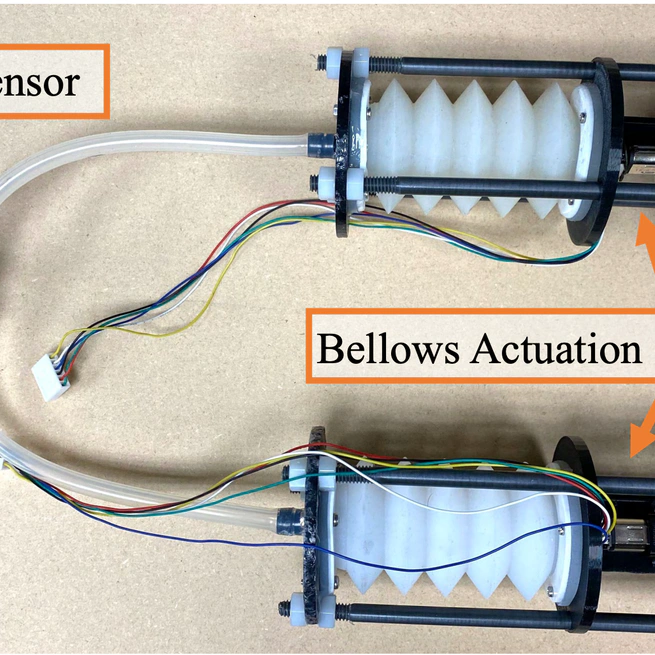
Design and Characterization of a Pneumatic Tunable-Stiffness Bellows Actuator
we are aiming to build a pneumatic actuator that is free of air compress source and valves. We are also trying to find an precise model to characterize its output including position, volume, pressure and force.
Feb 1, 2024
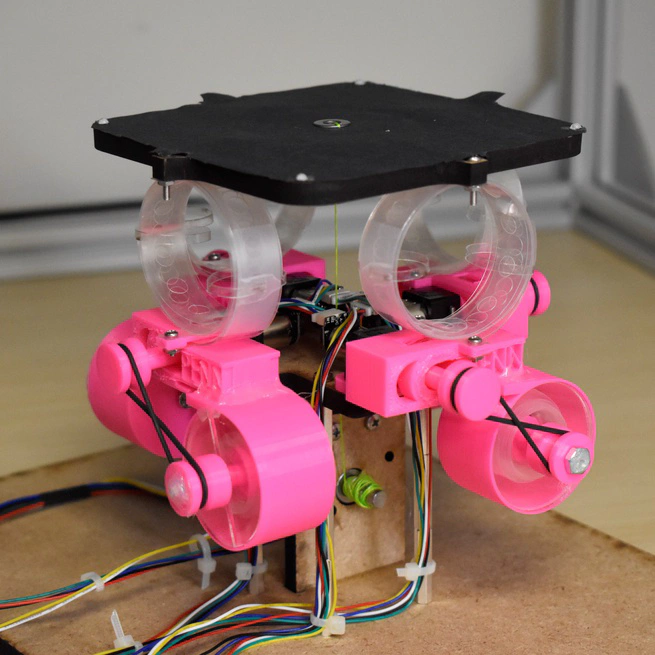
Design and Control of a Tunable-Stiffness Coiled-Spring Actuator
Soft robots have many advantages compared to rigid robots, including the ability to deform continuously and compliantly, adapt to unknown situations, and so on. In this research project, we design and build a new kind of manipulator using tunable stiffness springs.
Aug 30, 2023
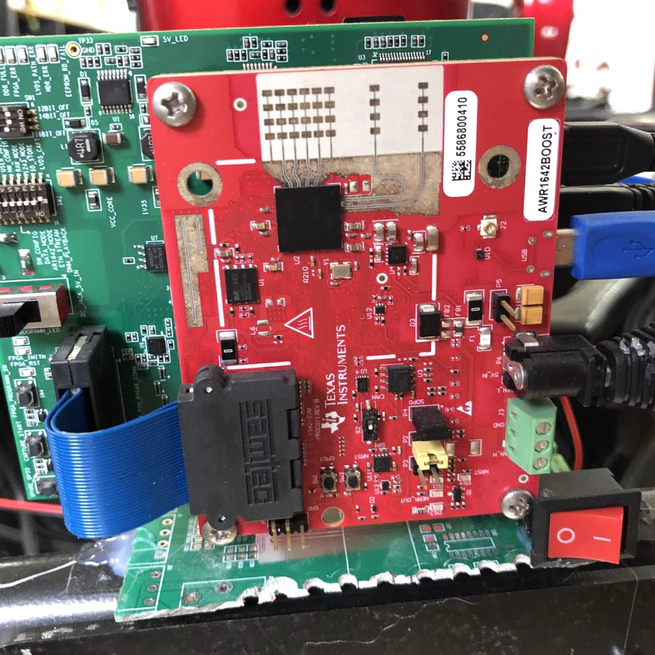
A Cluster-Based Weighted Feature Similarity Moving Target Tracking Algorithm for Automotive FMCW Radar
We developed a target tracking algorithm for automotive mmWave radar. Due to radar image low resolution, it’s hard to classify objects by data points. To make the targets more distinguishable, our algorithm merges the points into a bigger cluster, extract features for later classification and tracking tasks.
Jul 1, 2022