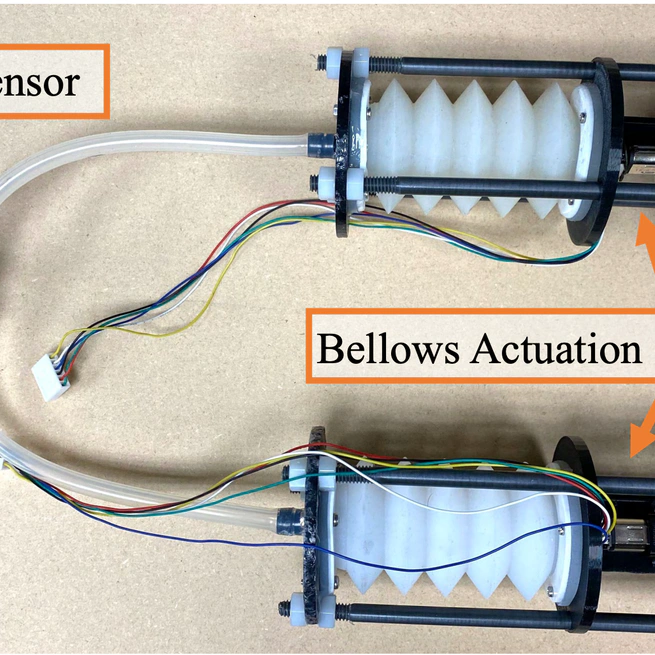
Design and Characterization of a Pneumatic Tunable-Stiffness Bellows Actuator
we are aiming to build a pneumatic actuator that is free of air compress source and valves. We are also trying to find an precise model to characterize its output including position, volume, pressure and force.
Feb 1, 2024
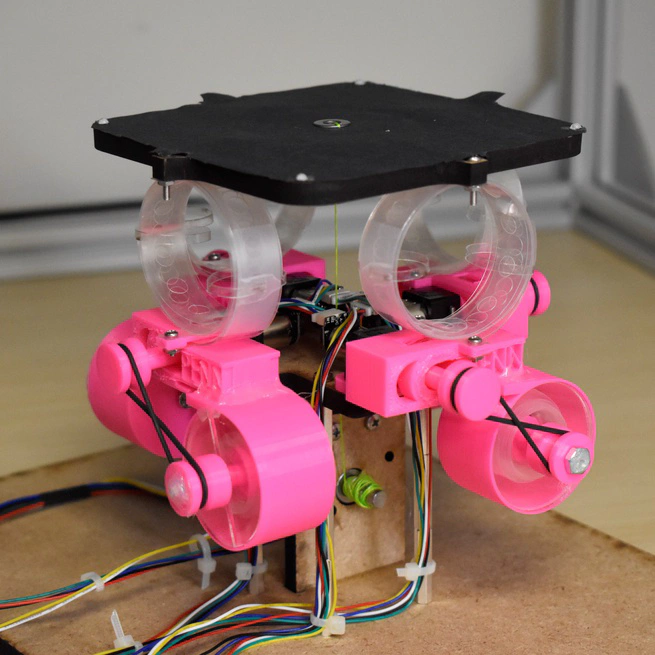
Design and Control of a Tunable-Stiffness Coiled-Spring Actuator
Soft robots have many advantages compared to rigid robots, including the ability to deform continuously and compliantly, adapt to unknown situations, and so on. In this research project, we design and build a new kind of manipulator using tunable stiffness springs.
Aug 30, 2023